工具内容
指示空速
指示空速是飞行员在空速指示器 (ASI) 上看到的空速读数,由飞机上的皮托静压系统驱动。该系统使用总压力(由皮托管探头测量)和静压(由静态端口测量)之间的差值来确定动态压力,该动态压力可转换为空速读数。
皮托静压系统的工作原理是伯努利方程,该方程指出流体速度的增加必须同时导致流体压力下降或流体势能降低。
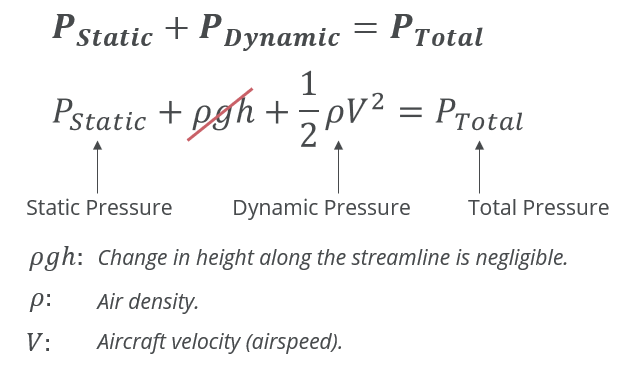
总压力(也称为停滞压力或皮托管压力)由皮托管探头测量。移动的空气进入探头,并通过探头的几何形状使其静止。
测得的静压是静止空气的环境压力,即飞机当前高度处空气的气压。静压不仅用于计算空速,还用于计算飞行过程中的高度(高度计)和垂直速度 (VSI)。静态端口始终齐平安装,确保端口开口位于空气不流动的边界层内。
因此,空速计算如下: 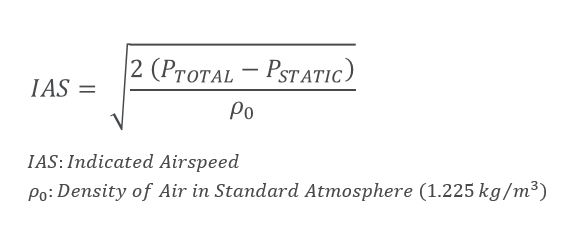
分母中的密度项不是常数,并且随海拔高度和温度而变化。然而,驾驶舱中的空速指示器总是根据 标准日的海平面密度 进行校准。因此,当飞机在更高的高度和不同的温度下飞行时,实际空速(真实空速)将与指示的空速有很大差异。
在驾驶舱中使用 IAS 的一大优势是,无论高度或环境温度如何,飞机都将始终以相同的指示空速(对于给定的飞机配置)失速。这使得飞行员更容易驾驶飞机,因为无论环境条件如何,定义工作范围的临界速度都保持不变。
校准空速
校准空速是针对仪器和位置误差校正的指示空速。该误差是用于计算动态压力的皮托静压系统质量以及探头在飞机上位置的函数。
位置误差是由于飞机周围的局部速度会因飞机几何形状的变化而变化而引起的。例如,机翼上表面的局部速度高于机翼下方的速度,以便产生升力。实际上,整个飞机都存在速度梯度,尤其是在有大量曲率的区域(机身前部、挡风玻璃、机翼表面)。